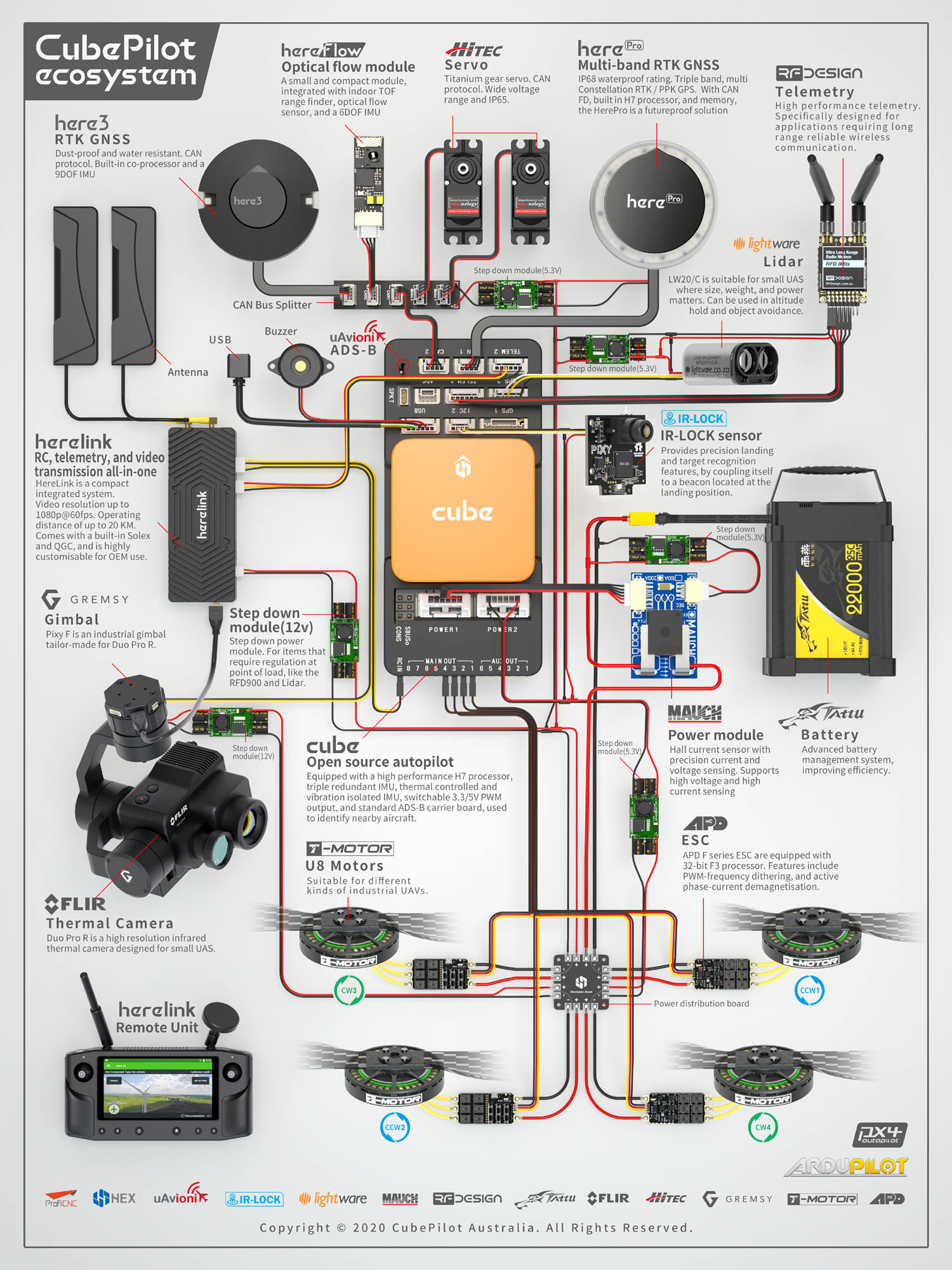
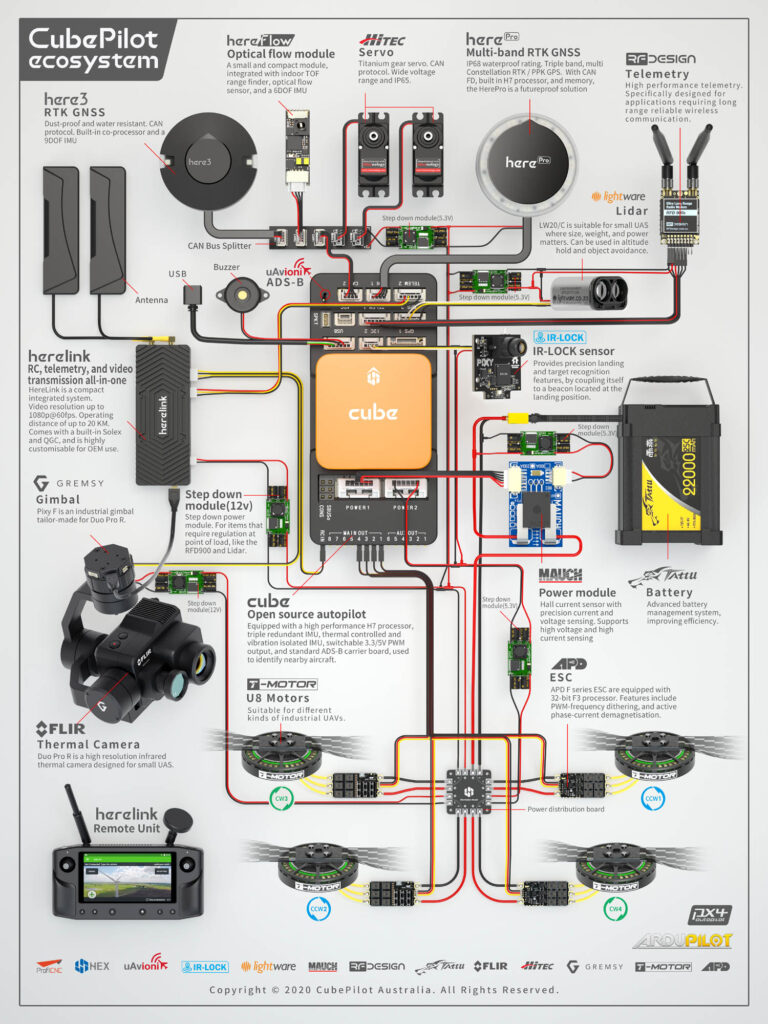
Drone flight control refers to a control system that can stabilize the flight attitude of the UAV and control the autonomous or semi-autonomous flight of the UAV. The core system of the drone, known as the brain of the drone, is one of the core technologies of the drone. The flight control generally includes three parts: sensors, on-board computers and servo actuation equipment. Its main function is to automatically maintain the normal flight attitude of the aircraft, including geomagnetic induction, ultrasonic sensors, optical flow sensors, control circuits, accelerometers, and air pressure. It consists of sensors, GPS modules and gyroscopes. this article will tell us How does the flight controller control the drone?
Among various UAVs, the flight control of fixed-wing UAVs usually includes control surfaces such as ailerons, direction, throttle, lift, and flaps. The wing surfaces of the aircraft are changed through the steering gear to generate corresponding torque to control the aircraft. Turn, climb, dive, roll and other actions. The multi-rotor UAV controls the attitude of the UAV by controlling the rotation speed of the blades of each axis.
For fixed-wing UAVs, when the attitude is stable, controlling the rudder will change the heading of the aircraft, usually causing a certain angle of roll. On a stable aircraft, it looks like a car turning on the ground. Call it a slip test. Rudder is the most commonly used method for automatic control turning. The disadvantage of rudder turning is that the turning radius is relatively large, which is slightly less maneuverable than aileron turning. The function of the ailerons is to control the roll of the aircraft.
When a fixed-wing aircraft rolls, it will turn in the direction of the roll and drop a certain height at the same time. The function of the elevator is to control the pitch of the aircraft, the pull rod is raised, and the push rod is lowered. When the stick is pulled, the aircraft lifts up and climbs, and the conversion of kinetic energy to potential energy will reduce the speed. Therefore, the airspeed should be monitored during control to avoid stalling due to excessive stick pull. The function of the throttle rudder is to control the speed of the aircraft engine. Increasing the throttle amount will increase the power of the aircraft, accelerate or climb, and vice versa.
And in the elevator and throttle control. Fixed-wing aircraft have a minimum speed per hour called stall speed. When the speed is lower than this speed, the rudder effect will fail because the aircraft cannot obtain enough lift, and the aircraft will lose control. The current airspeed of the aircraft can be known in real time through the airspeed sensor of the aircraft. When the airspeed decreases, the aircraft must lose altitude by increasing the throttle or push rod in exchange for the increase in airspeed. altitude in exchange for a reduction in airspeed. Therefore, there are two different control modes for fixed-wing aircraft, which can be selected by the user according to the actual situation:
The first control method is, according to the set target airspeed, when the actual airspeed is higher than the target airspeed, control the elevator lever, and vice versa; the airspeed affects the altitude, so the throttle is used to Control the altitude of the aircraft, when the flight altitude is higher than the target altitude, reduce the throttle, otherwise increase the throttle.
When the aircraft is flying, if it is lower than the target altitude, the flight control throttle increases, resulting in an increase in airspeed, and then the flight control control lever is pulled, so the aircraft rises; when the aircraft altitude is higher than the target altitude, the flight control throttle decreases, resulting in airspeed Decrease, so the flight controller controls the push rod again to reduce the altitude. The advantage of this control method is that the aircraft is always controlled with airspeed as the first factor, thus ensuring the safety of flight, especially when abnormal conditions such as engine stall occur, the aircraft can continue to maintain safety until the altitude is reduced to ground. The disadvantage of this method is that the height control is indirect control, so the height control may have a certain lag or fluctuation.
The second control method is: set the angle of attack when the aircraft is in level flight. When the flight altitude is higher or lower than the target altitude, on the basis of the level flight angle of attack, set a PID based on the difference between the altitude and the target altitude. The climb angle of the limited amplitude output by the controller is controlled by the deviation of the current pitch angle and climb angle of the aircraft to control the elevator surface, so that the aircraft can quickly reach this climb angle and complete the elimination of the altitude deviation as soon as possible.
However, when the altitude of the aircraft increases or decreases, it will inevitably cause changes in airspeed. Therefore, the throttle is used to control the airspeed of the aircraft, that is, when the airspeed is lower than the target airspeed, the throttle is increased on the basis of the current throttle, and the current airspeed is high. After the target airspeed, reduce the throttle based on the current throttle. The advantage of this control method is that it can respond immediately to changes in altitude, so the altitude control is better. The maximum elevation angle, and eventually stall due to lack of power.