What is the PWM signal?
The PWM signal is used to control a single ESC or a single servo pulse width modulation signal.
There are many types of PWM signals used on the steering gear (ESC). Here we will describe the common PWM signal characteristics:
1. The PWM signal is a periodic square wave signal with a period of 20ms, which is a refresh frequency of 50Hz.
2. The high level duration in each cycle of PWM is 1~2ms (1000us~2000us), which represents the throttle control amount. Generally, 1100us corresponds to 0 throttle in a quadrotor, and 1900us corresponds to full throttle.
What is PPM signal
PPM signal is a signal modulated by putting multiple control channels (generally 10 control channels) together. That is, a PPM pulse sequence contains multiple channels of information. As shown below: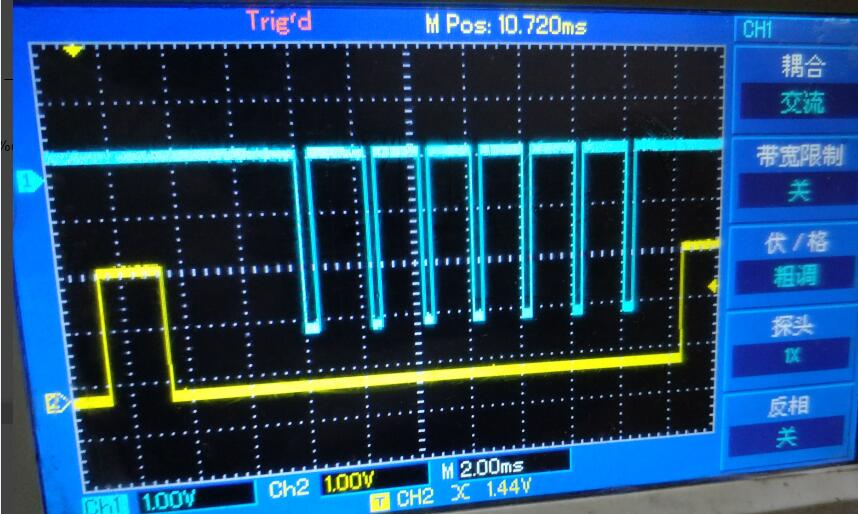
The corresponding relationship between PPM and PWM is as follows:
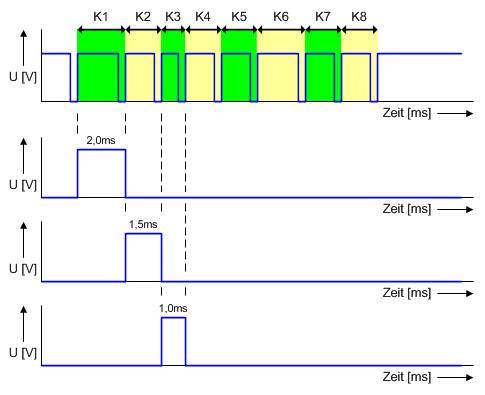
In the above figure, the first row is the PPM signal, and the lower rows are the PWM channel signals. The above figure expresses the correspondence between multiple channels and PPM signal encoding.
The standard PPM signal starts with a low level of 0.4ms. The interval time of the rising edge of the level is used to express the control amount of each channel. After 10 rising edges are generally arranged, the level remains high until the next PPM signal is repeated.
The PPM signal can be regarded as a frame of data, which contains 8 channels of information. The interval of each rising edge is exactly equal to the high level duration of the PWM signal, which is between 1000us and 2000us. The repetition period of PPM is also 20ms, which is also a refresh rate of 50hz. If you haven’t understood it yet, there will be a detailed legend below.
2.1. PPM to PWM example
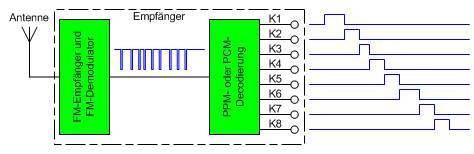
The remote control receiver receives the remote control command and outputs the PPM signal. The PPM signal outputs 8 PWM signals through the PPM decoding circuit.
2.2. PWM to PPM example
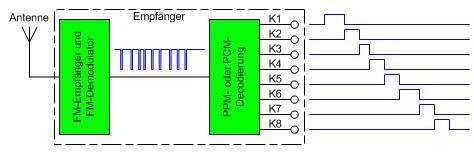
The picture above shows that the PWM signals of multiple channels are converted into PPM signal output through the PPM encoding circuit.
3.PPM signal
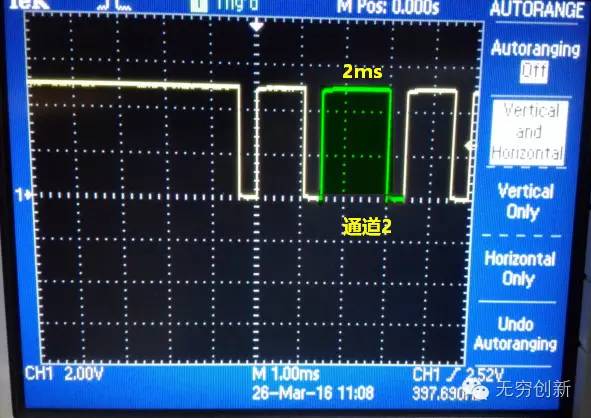
3.1. Channel 1, 100% throttle
When channel 1 is at 100% throttle, the PWM high level time is 2ms, and the rising edge interval of PPM channel 1 is 2ms. Look at the green instructions.
3.2. Channel 1, 50% throttle
When channel 1 is at 50% throttle, the PWM high level time is 1.5ms, and the rising edge interval of PPM channel 1 is 1.5ms. Look at the green instructions.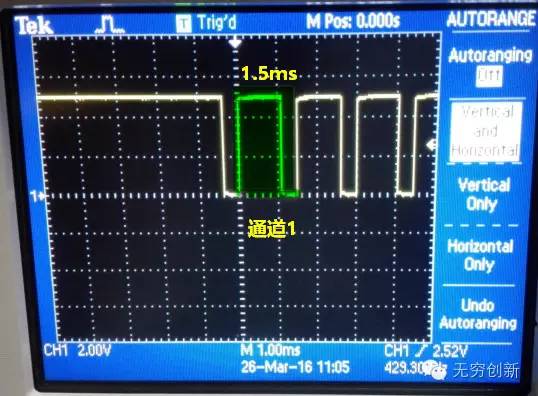
You Might Also Like